
This blog is written by our Zephyr Project community members Hiroshi TOKITA (@soburi), Engineer at Fujitsu and Yasushi SHOJI (@yashi) Co-Founder & CEO at Space Cubics. (Discord usernames in brackets).
On July 4, 2025, the Zephyr Project community gathered at Space Cubics in Sapporo for the first official Zephyr meetup in Japan. The afternoon was filled with talks and discussions on space, automotive, virtualization, ROS, and hardware customization.
When & Where
The meetup ran from 2:00 to 5:30 PM at SpaceCubics, a Sapporo-based aerospace startup.


The city is known for its vibrant startup scene, and just nearby are landmarks such as the Nijo Market and the historic Hokkaido Government Office, which was also featured on the event announcement page.
The former Hokkaido Government Office building is also just a few minutes’ walk away.
Why Sapporo?
Sapporo is emerging as a hub for semiconductors and space in Japan—making it a fitting place for a Zephyr gathering that highlighted real-world, safety-critical use cases.
Session Highlights
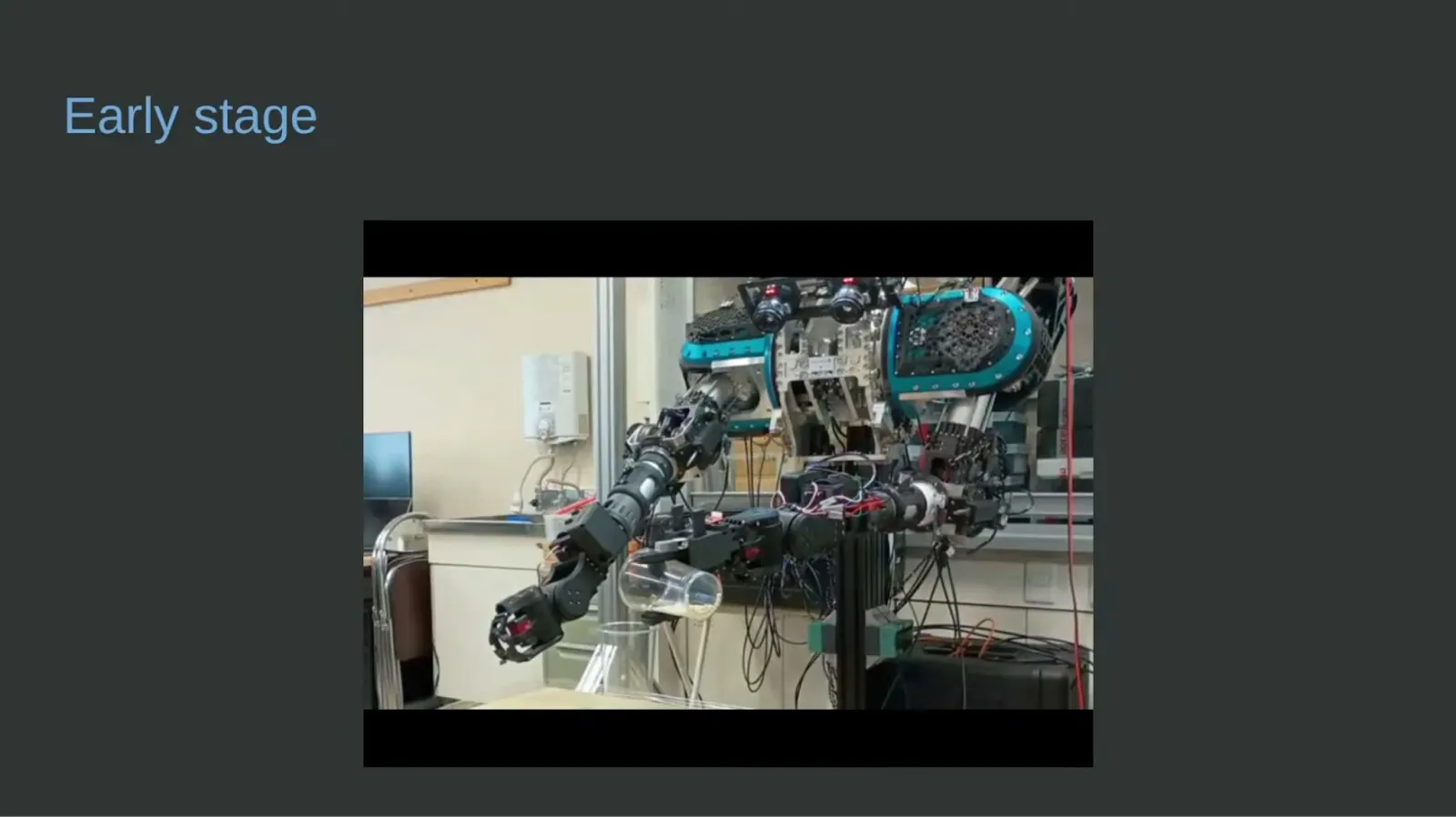
Zephyr Subsystem in Spacecraft — Takuya SASAKI
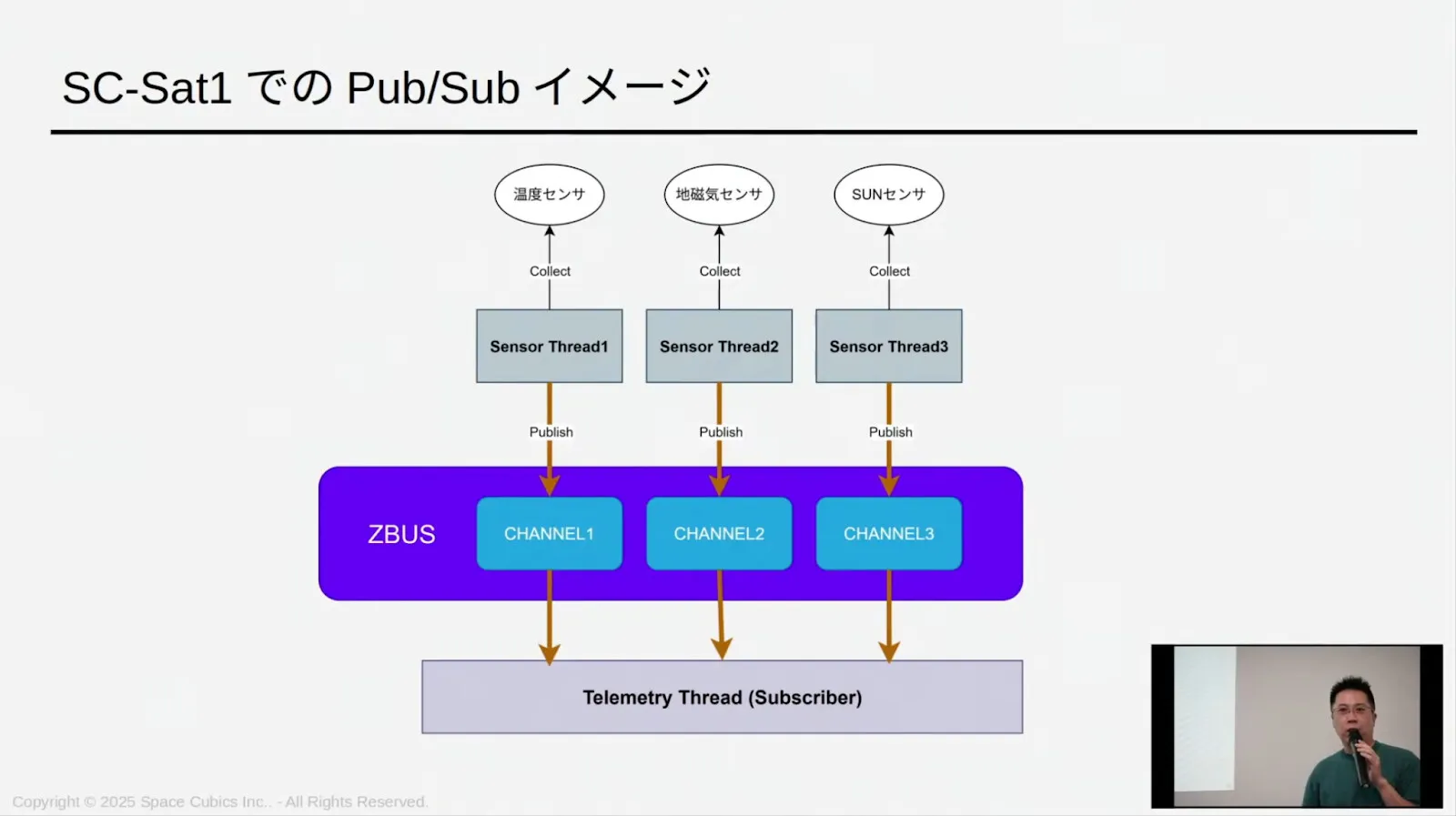
Takuya Sasaki introduced how Zephyr is used in spacecraft subsystems. He highlighted the importance of telemetry in satellite operations and shared practical use cases:
- Logging for debugging and onboard event recording.
- LittleFS for storing logs during loss of signal.
- Zbus for managing sensor data and telemetry threads.
He emphasized that while space systems sound complex, much of the OS-level work is similar to standard embedded development, and encouraged more engineers to join space projects.
Having Tried to Port to an RX Board — @jun1_hirata
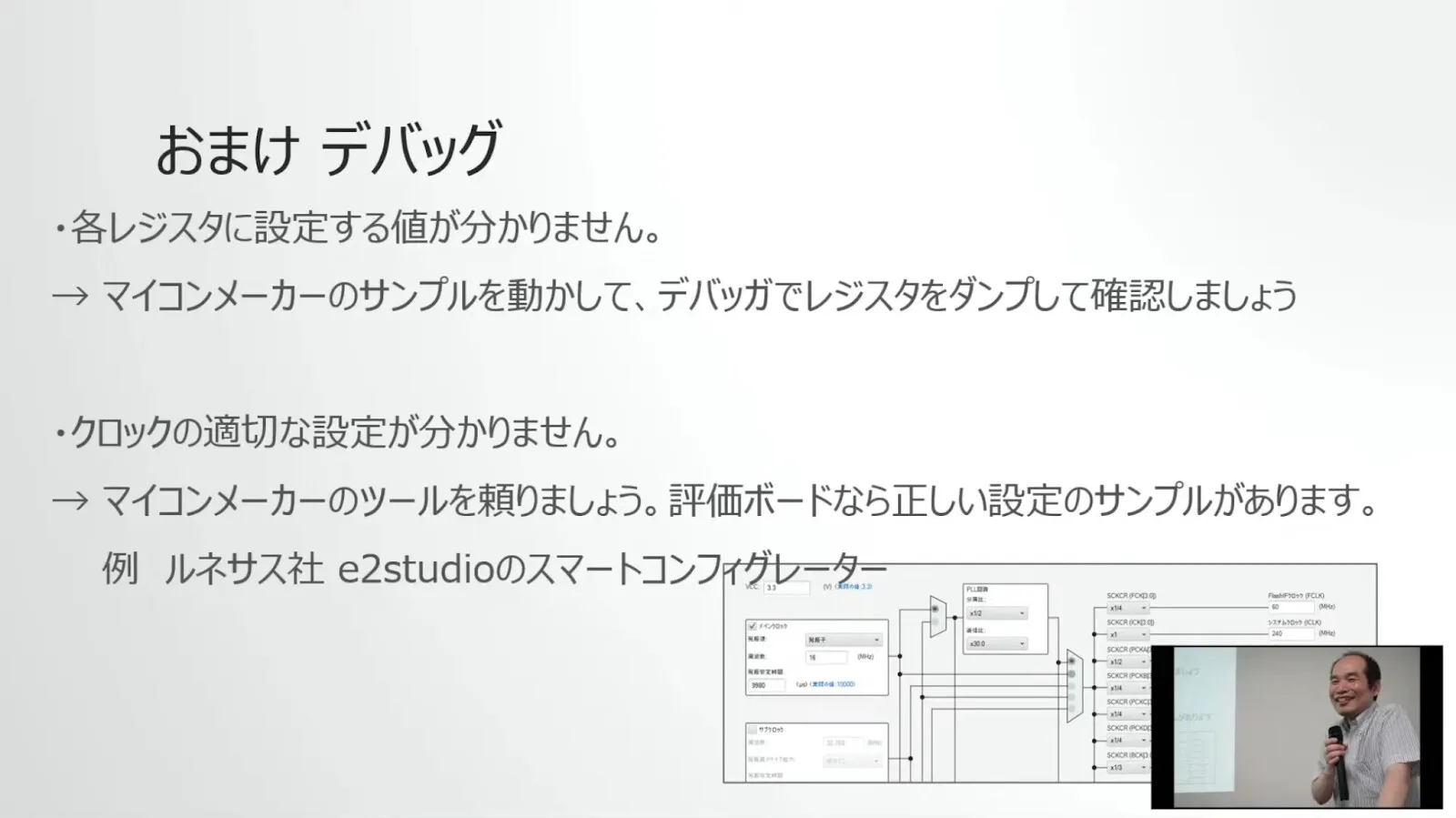
Junichi Hirata presented his effort to port Zephyr to a Renesas RX72N Envision Kit, building on the already upstreamed RX130 Starter Kit. Using RX130 as a reference, he adapted board definitions and configured clocks, timers, UART, and GPIO to get the classic blinky LED sample running.
He noted challenges such as limited debug support with the E2 Lite emulator, and explained that his work is still local (not yet upstreamed). His talk illustrated the practical steps and hurdles of extending Zephyr to new RX boards.
Virtualization Swamp Dive Tour with Zephyr — Hiroshi TOKITA (@soburi)
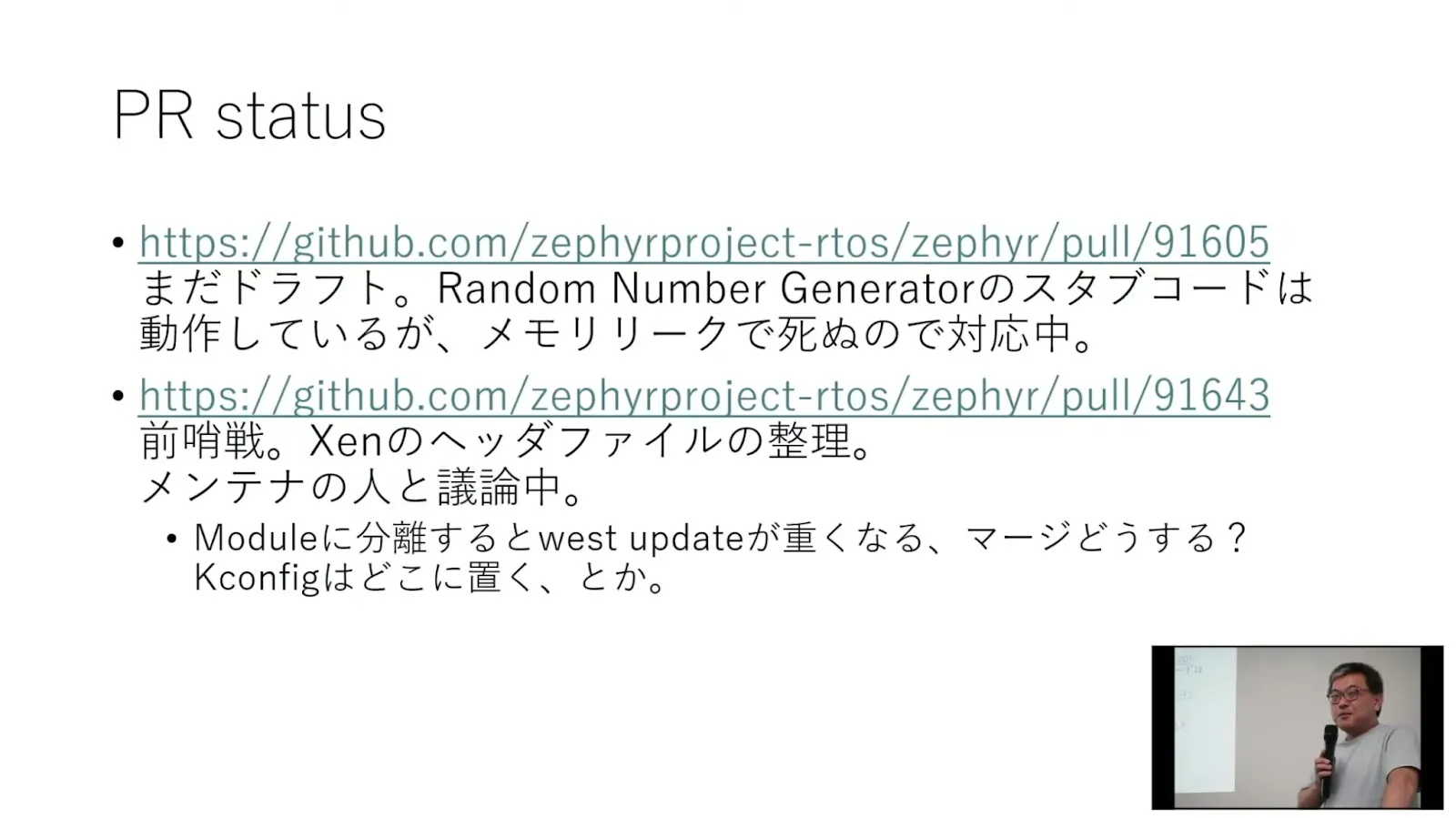
Hiroshi Tokita explored using Zephyr as a driver domain in Xen, replacing Linux to reduce footprint and simplify maintenance. He discussed the potential benefits for real-time and safety-critical systems, and touched on ARINC 653’s time-partitioned, cyclic model, noting that it can make interrupt handling more constrained.
The talk highlighted Zephyr’s flexibility in virtualization scenarios and sparked discussion on applying it to avionics-style partitioning.
How to Make a Zephyr Module — Yasushi SHOJI (@yashi)
Yasushi Shoji demonstrated how to integrate a micro-ROS module into west. He noted that both Zephyr and ROS have strong, sometimes conflicting toolchains and workflows, making combined use powerful but cognitively demanding.
His talk provided a practical path to reduce that overhead, showing a working example of Zephyr and ROS integration through a custom module.
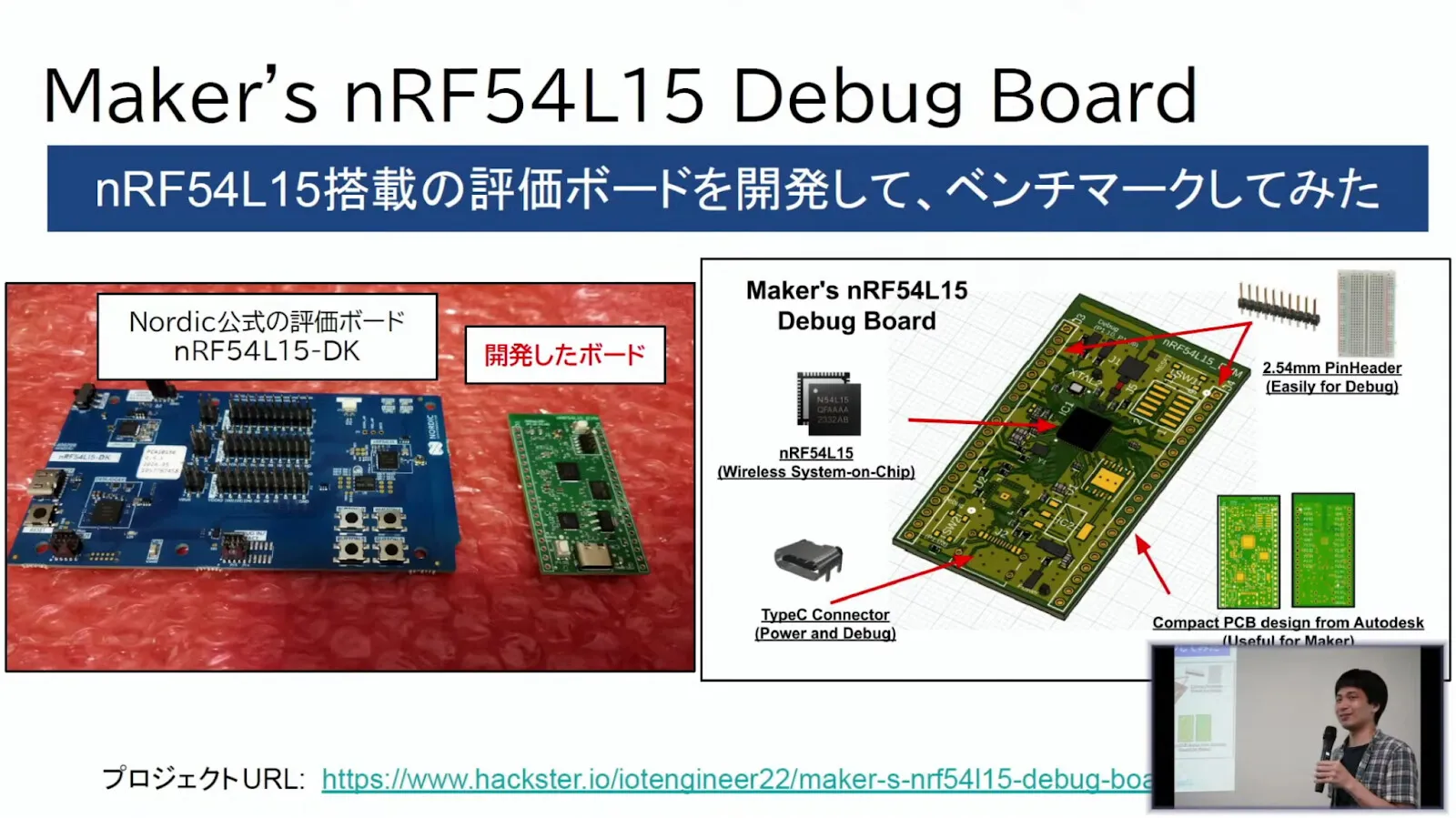
Joining a Development Competition with Zephyr RTOS — @misoji
Recent hardware hackathons (incl. Nordic-based designs) highlighted how Zephyr accelerates custom boards.
@misoji shared his experiences at recent hardware hackathons, including projects built on Nordic-based designs. He showed how Zephyr helped speed up custom board development and enabled participants to get working prototypes quickly.
Also: building a six-layer board in just one month? Let’s just say that’s… ambitious. The story underlined both the challenges of hardware design under time pressure and the way Zephyr lowers barriers for rapid experimentation.
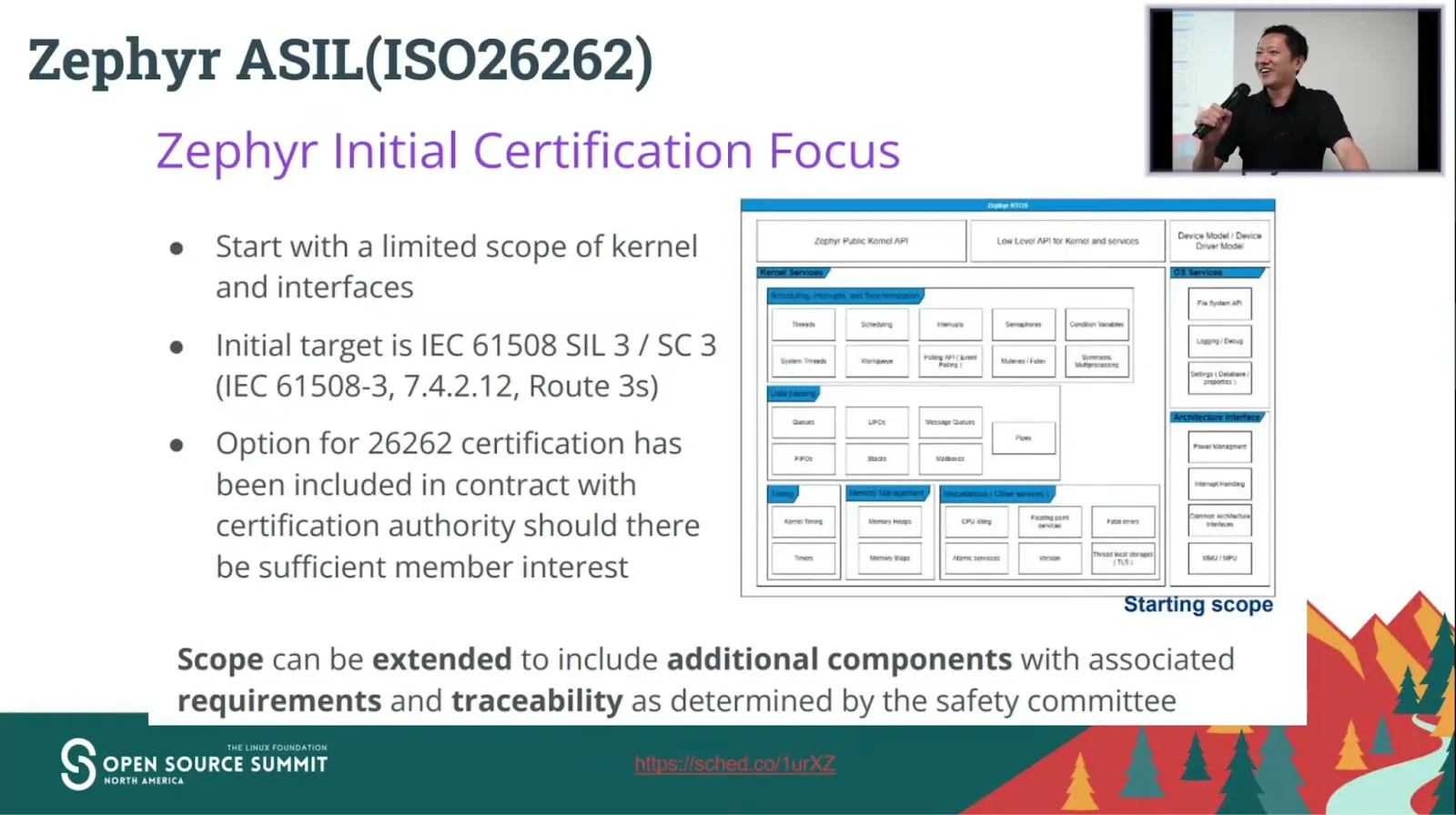
Applying Zephyr in Automotive — Yuichi KUSAKABE
Yuichi Kusakabe introduced Honda’s efforts to realize a Software-Defined Vehicle (SDV) using open-source software. He emphasized that functional safety is a central challenge in the automotive industry and highlighted how Zephyr and Xen can serve as essential infrastructure in this space.
He also reflected on the energy at the meetup, saying it was filled with enthusiasm, and expressed his hope to move forward together with the Zephyr community.
Lightning Talk session
Live CFP Submission — @soburi
In a playful session, @soburi attempted to submit a conference proposal live. The form wasn’t completed, so “Submit” wasn’t actually pressed, but the audience exchanged concrete tips on CFP writing and common pitfalls among Japanese submitters. The shared takeaway: keep submitting CFPs to keep the community lively.
PyCon and Mini DebConf — Shunske YOSHIDA
Shunsuke Yoshida, an organizer of PyConJP, introduced PyConJP and the upcoming Mini DebConf Japan. With Mini DebConf scheduled nearby, participants were encouraged to join and cross-pollinate between communities.
Next Meetup in Japan: Osaka — October 20, 2025
The next Zephyr Project meetup in Japan will be held in Osaka on October 20, 2025, the day before LF Japan Community Days.
Further details will be shared soon, and more information will be announced here. Please mark your calendars and include this event in your plans.
Conclusion
The first meetup in Japan was a great success. Participants came from across the country, and we wrapped up with a shared goal: spread the excitement to other regions and keep hosting meetups around Japan.
Check out more photos from the Sapporo meetup here. Watch the recordings here.


")
{kind=link}
{kind=link}