Written by Tim van Dam, Co-Founder of Smart Parks, and Luka Mustafa, Founder and CEO of IRNAS
This blog originally ran on the Smart Parks website. For more content like this, click on their website.
For the past two months IRNAS and Smart Parks, in partnerships with Hackster.io have been working on building the next generation OpenCollar ElephantEdge tracker, closely looking at requirements and features that make this a success. Two key concepts are driving it, rock solid performance field performance and an intuitive user experience. In the previous blog and webinar we did a deep-dive into the technical choices made in the design process and the experiences shared by Smart Parks, we hereby look deeper into the firmware and workflow aspects.
Together we make sure to deliver sustainable, future-proof solutions. This requires a skillful integration of the latest technologies with years of development experience and a very agile hands-on process with the users, such that we converge to the best solution in the shortest amount of time.
Hackster.io will announce the contest winners of the ElephantEdge campaign on November 18th. With this campaign, we have called on the community to build ML models using the Edge Impulse Studio and tracking dashboards using Avnet’s IoTConnect, which will be deployed onto 10 production-grade collars. We will also report on this soon, so keep following us!

Development update
ElephantEdge tracker development is now shifting from background development of the system into implementing user features and extensively testing them. There are four key components to get a successful solution.
- Mechanics
- Electronics
- Firmware
- Smartphone Application
We strive to reduce the complexity of each while adding as many features as possible.
Mechanics
Robustness is an understatement of the requirement when a unit of hardware is exposed to the force of an elephant in the wild. The electronics and antenna systems are safely mounted into a custom milled hard-plastic enclosure. This enclosure is closed with aluminum mounting parts and not to miss, a synthetic BioThane belt setup. As animal welfare is the primary concern, ergonomic design is applied to prevent abrasions and damage to the animal while at the same time remaining sufficiently simple to install. The last feature is important to reducing the time is needed in field to collar an animal.

The current design has been field proven on the previous generation of OpenCollar Elephant trackers and is at the moment undergoing mostly internal design changes to support the electronics as well as externally adding the new required features. The only bigger change we are planning is to make a somewhat bigger version to increase the space for extra battery capacity, which may be nice to have for specific high-resolution sensors applications. The next step upon validation of electronics and antennas is the manufacturing of field deployable units to test.
Electronics
The ElephantEdge electronics is now in the second board revision. In the first compact form-factor design we have put together all the major components to enable firmware integration and feature testing. While testing and developing a number of improvement opportunities have been discovered and these have now been implemented in the second design revision – which is a fully featured and compact board design for power-efficient tracking and machine learning.

The open nature of the design means that we have paid special attention to select the form-factor which supports the reuse for other tracking applications. The tracker size – in most cases – is driven by battery dimension. Typical sizes of round battery cells that are being used: 14250, 17500, 18500 and 18650. Therefore, an optimal format is defined by a number of these cell-types combined in parallel, where most cases of long-term tracking require at least two cells. For size comparison look at the Smart Parks Rhino trackers we have designed for size-constrained applications.
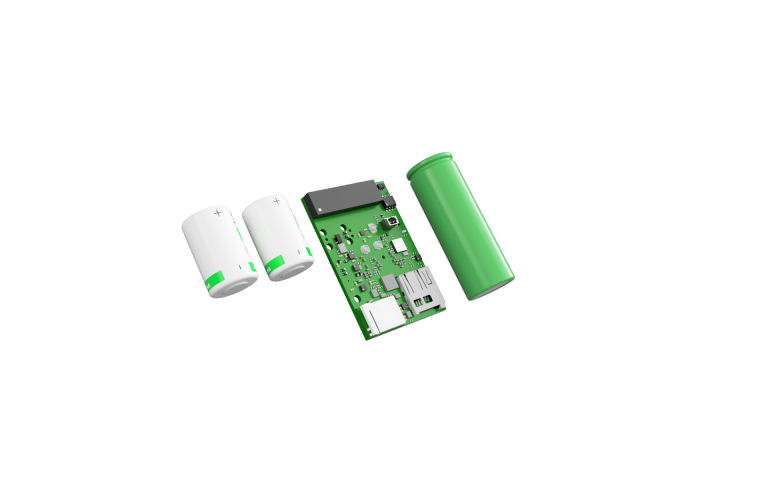
For ElephantEdge we now have a compact formfactor of 35mm by 50mm, comprised of the sensors, connectivity, storage and processing capabilities with integrated GPS and multi-band antennas supporting BLE, LoRa and WiFi, along with connection options for larger antennas, for example to support Lacuna.space connectivity.
The current design is in the assembly process and will undergo extensive lab and field testing in the coming weeks.
Firmware
Although devices such as trackers usually have one simple function, there is a lot happening in the firmware heart. Signals from the GPS system need to be acquired correctly, so the battery life can be as long as possible, users need to be able to easily access the data and configure the device remotely and locally, machine learning systems need to process data and wireless communications need to be supported. All these tasks need to run at the same time to provide flawless operation. To achieve all of these tasks with a clean and reliable implementation, we have chosen Zephyr RTOS. Zephyr RTOS is supported by Nordic Semiconductor as the vendor of the BLE component and combined with several communication drives developed at IRNAS.
The Zephyr Project is a scalable real-time operating system (RTOS) supporting multiple hardware architectures, optimized for resource-constrained devices, and built with security in mind. The Zephyr RTOS is based on a small-footprint kernel designed for use on resource-constrained systems such as animal trackers. It prioritizes the system layer for IoT terminal devices such as sensors, wearables, and other small connected objects.
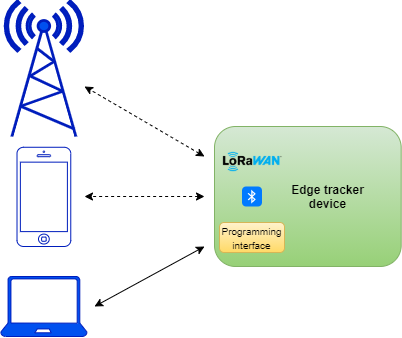
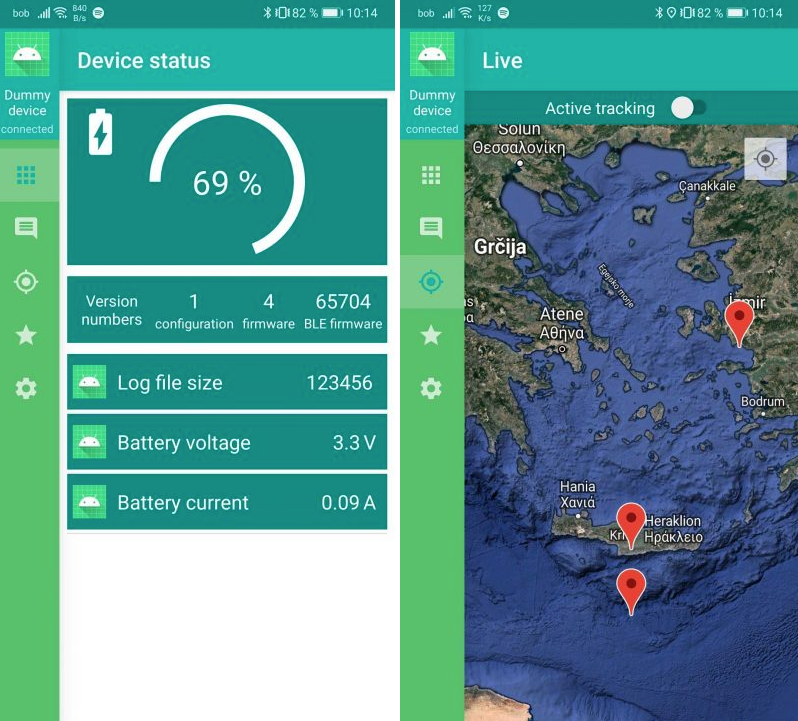
Besides having good tracking and location features, one of the most important functions of the device is for configuration and data collection. This is what separates good products from the bad ones, since users will interact with the device on a daily level. Since these trackers will be deployed in remote and hardly accessible places, we have learned that users need to be able to get the data and configure the device from a central and safe place. Devices are equipped with short and long-range wireless transceivers, Bluetooth LE and LoRaWAN. Having that in mind we have built the configuration system such that it is accessible from all available communication streams. When devices are produced in the factory or reprogrammed in the field, a technical person in the team can easily change the settings JSON file and build the new release of the software. Knowing that not all users have the technical background we have made the device setting configuration accessible to the user via mobile and web applications. Using a mobile application, users will be able to connect to the device via BLE and access its command and settings list where it can change everything locally being close to the animal wearing the tracker. On the other hand, sometimes it is necessary to do this remotely and that is why it can over LoRaWAN (generally exposed to users by a web application like Avnet’s IoTConnect).
The firmware is currently in Alpha stage with communication, data acquisition and processing features, being extended with user-features and detection mechanisms. In the next version we will also work towards full integration with EdgeImpulse, to enable all this great use-cases we are looking for.
Smartphone application
The final piece of the puzzle in offering a great use-experience is the (smartphone) application, enabling convenient management of the trackers in the field, automatic provisioning and configuration of large batches of devices and straightforward integration of machine learning data collection process.
Upon a review of technologies, React Native has been chosen as the framework enabling cross-platform app development with BLE support and a programming language supporting binary data operation, which significantly simplifies the communication with devices.