Written by Hugh O’Keeffe, CEO at Ashling
Ashling’s RiscFree SDK provides full support for Zephyr RTOS running on RISC-V and Arm based IP cores and devices. This includes debug support designed to streamline the development process for embedded systems and allowing engineers to more efficiently build, test, debug and optimize software running on the Zephyr RTOS.
RiscFree‘s Zephyr-specific views provide developers with valuable insights into the behavior and status of their embedded systems running the Zephyr RTOS. These views help to identify potential bottlenecks, synchronization issues, and other problems, thereby streamlining the development and debugging process.
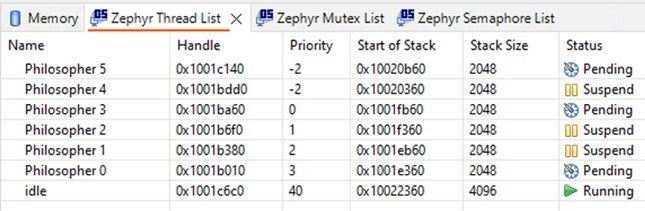
The Thread View (shown below) in RiscFree offers a comprehensive overview of all active threads in the system, displaying crucial information such as thread state, priority, stack usage, and other relevant data. This enables developers to easily monitor the status of each thread, identify potential issues, and optimize their system’s performance.
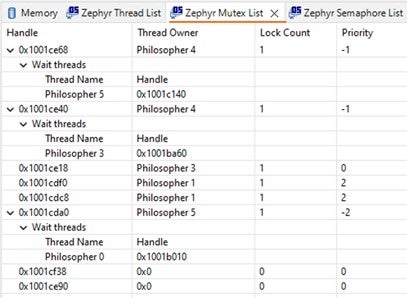
The Mutex View, another vital component of RiscFree‘s Zephyr-specific views, provides a detailed overview of all mutexes in the system. This view displays mutex ownership, waiting threads, and priority inheritance information. By monitoring mutex usage, developers can identify contention points and deadlocks, ensuring efficient resource allocation and optimal synchronization between threads.
Lastly, the Semaphores View in RiscFree offers insights into semaphore usage within the Zephyr RTOS. This view displays information on the current value, maximum value, and waiting threads for each semaphore in the system. Developers can use this information to analyze semaphore usage, identify potential bottlenecks, and ensure that resources are effectively managed throughout the system.

RiscFree‘s Debug View offers extensive support for thread management and analysis, allowing developers to efficiently monitor and control threads while working with the Zephyr RTOS. The Debug View provides a comprehensive look at the system’s current thread allowing developers to pause, resume, or step through it. This fine-grained control enables precise debugging and analysis, ensuring that developers can identify issues and address them effectively. In combination with other RiscFree features such as breakpoints and watchpoints, the thread listing in the Debug View presents a comprehensive debugging environment tailored to the unique requirements of the Zephyr RTOS.

To learn more details about RiscFree, click here.